先端リハビリテーション医学
機能的電気刺激(FES)
機能的電気刺激(functional electrical stimulation; FES)は、脊髄損傷や脳卒中などで麻痺した手や足を動かす治療法です。当科では、1990年代からFESによる四肢麻痺、対麻痺、片麻痺などの機能再建治療に取り組んできました。FESにより、麻痺した手を動かして物を握ったりつまんだりする動作、麻痺した足を動かして立ち上がったり歩いたりする動作を再び行うことが期待できます。
経皮的埋め込み電極を用いたFESは、この分野における本邦初の高度先進医療として認可された歴史があります。
一方、表面電極を用いたFESは、麻痺発症後早期から治療を始めることが可能になります。
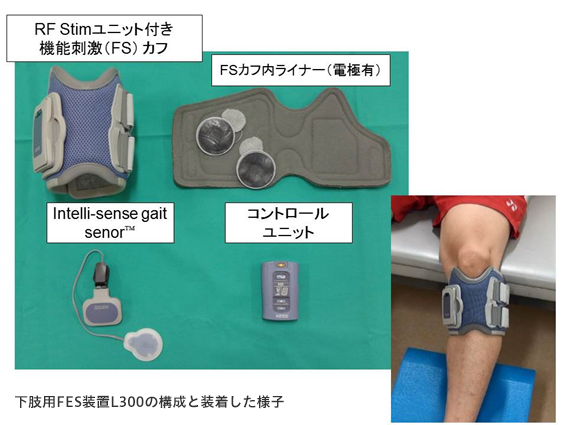
NESS H200、NESS L300は米国Bioness社で開発された装具型表面電極FES装置であり、 NESS H200は脊髄損傷による四肢麻痺上肢や脳卒中による片麻痺上肢の障害に対する手指機能再建、NESS L300は脳卒中による片麻痺性尖足障害に対する歩行機能再建が可能で、欧米を中心に普及が進みつつあります。
当科では、本邦で始めてNESS H200とNESS L300を導入しました。この機器は厚生労働省の薬事承認を受け、現在では国内で1500台以上の使用実績があります。
上肢用のH200は現在、最新のH200Wirelessとなり、単独での使用のみならずリハビリテーションロボットとのハイブリッド使用の試みなど先端的な研究を継続し、国内外の学会などで発表しています。



リハビリテーションロボット
ロボット技術の進歩により、リハビリテーションにロボットを導入する試みが注目されています。
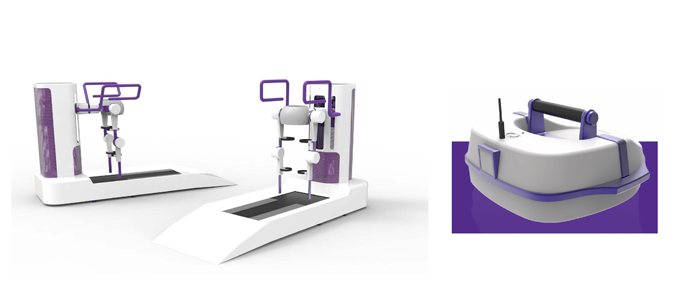
当科では、医工連携によりFESとロボット技術を融合した新しい歩行練習用リハビリテーションロボット「Akita Trainer」を開発し、実証試験を進めています。脳卒中片脚用と脊髄障害等両脚用を開発し、幅広い適応を目指します。
また、上肢用のリハビリテーションロボットは従来大型で持ち運びが困難であり高価なものが多いのが現状ですが、卓上型のコンパクトなリハビリテーションロボット「リハビリマウス」を開発しました。訓練はAR(Augment Reality:拡張現実)用のHMD(Head Mounted Display:頭部装着型のゴーグル)を装着して行うこともできます。病院での実行が困難な実生活の仮想環境を作り出して、そこに入り込んだ感覚やゲーム感覚で訓練でき, モチベーションが継続するなどといった効果が期待できます。
現在実用化を目指して基礎研究・臨床応用を進めています。
FESサイクリング
脳梗塞や脊髄損傷など上位運動ニューロン傷害による麻痺下肢患者さんにFESを行いサイクリング運動を行うFESサイクリングは、心肺機能強化などのフィットネス対策に有用です。当科と秋田大学理工学部、秋田工業高等専門学校、秋田県立美術大学との医工連携により、車椅子に直接着脱可能な新しいFESサイクリングを開発中です。

動作解析
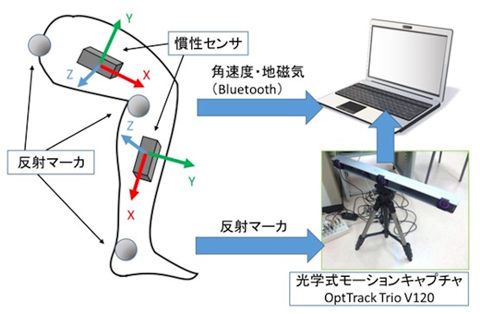
慣性センサ(IMU)を用いた動作計測が注目されており、これまでにも歩行解析やスポーツ、スキー等のスノースポーツの分野等で研究されてきました。IMUは安価なうえに、加速度、角速度、地磁気の計測が出来る事から他のモーションキャプチャーシステムと比較して多くのパラメータから解析が可能です。
我々は、IMUを用いた、膝関節の動作計測・評価システムを開発しています。
また、三次元動作解析装置のVICONやメガネ型ウェアルブルセンサ、足底圧センサなど様々な機器を駆使した動作解析を行っています。
モデルシミュレーション
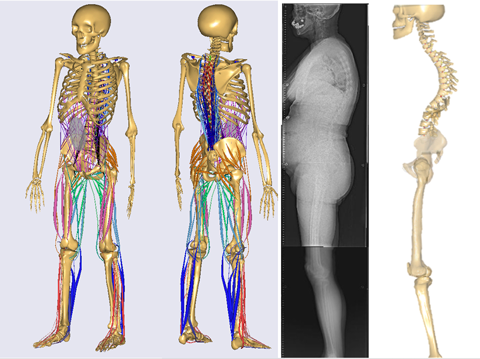
独自に製作した3次元筋骨格モデルを用いて、主に高齢者を対象とした脊椎疾患患者の生体内力評価を行なっています。3次元筋骨格モデルとはCT・MRI画像を基に筋肉や骨格を再現したもので、筋走行や関節駆動域が実際の人間と同様に再現されています。
このモデルに運動計測データを入力し動作シミュレーションをさせることで関節モーメントの他に、筋張力、筋活性度、関節間力等の生体内力の定量評価が可能となります。また、関節間力を解析することで有限要素解析(FEA)に用いる関節の荷重計算が可能となります。
現在は生体内力評価に加え、モデルの改良を行なっており、脊椎アライメントを再現した椎間板応力の解析や、成人脊柱変形における股関節への影響などを報告しています。将来的には新たなトレーニング・リハビリ技術の効果計測・開発等への応用が期待されます。
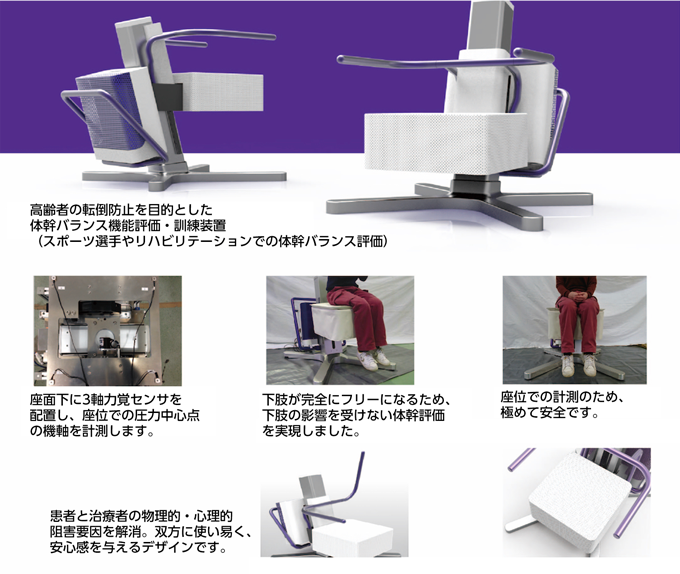
座位バランス計測装置
加齢に伴うバランス能力の低下は、転倒を引き起こす重要な因子と考えられており、高齢者に対するバランス評価は転倒予防の観点からも必須となっています。
しかし、立位でのバランス評価には、めまいや膝折れなどによる転倒の危険性も含まれるため、転倒リスクを抱えた高齢者には評価自体が危険な場合があり、バランス機能を安全かつ簡便に評価する手法の開発が望まれています。
安全にバランス機能を測定するため、当科と秋田大学理工学部の医工連携により動的座位によるバランス計測装置を開発し、これまでその有用性について多数の研究報告を行っています。
Brain Machine Interface(BMI)/ 人工筋肉
ブレインマシンインターフェース(Brain-machine interface:BMI)は脳活動によって機械を操作する身体代替技術です。BMIは手を動かさずにロボットを制御することができるため、「考えるだけで指令を送ることができるヒューマンインターフェース」であると言えます。東京工業大学の小池康晴教授らと共同研究を行っています。
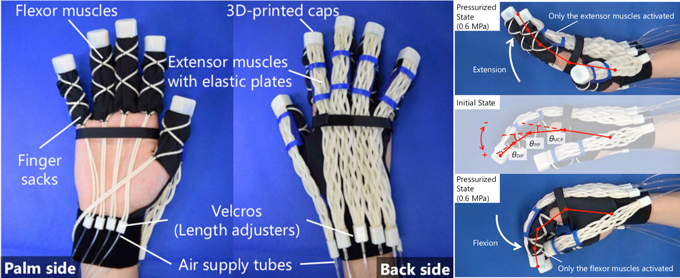
東京工業大学工学院の鈴森康一教授らは、空気圧で収縮する細径マッキンベン人工筋肉を開発されました。この人工筋肉は外径が2-5mmと従来の人工筋肉と比較し「はるかに細く柔軟で軽量」という特徴を併せ持っており、100万回の耐久試験にも耐えるほど安全性にも非常に優れたものです。
当科で継続して行われていた医工連携事業と、東京工業大学のBMIや人工筋肉技術を融合することで新たな医療機器の開発が行われ、現在プロジェクトが進行中です。
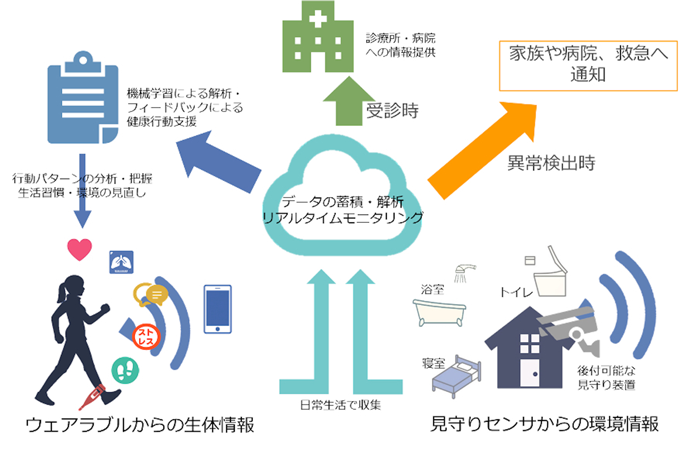
高齢者の生活見守り・健康支援システム「サイバーライフ」
高齢化が進む中で独居や、高齢二人暮らしの方が増えています。高齢者の暮らしには転倒・転落、溺水、熱中症など、様々な危険が潜んでおり、加齢に伴う身体機能の低下やストレスに対する予備能の低下、環境への適応能力の低下などはこうした危険を助長します。いずれも命に関わる危険であり、命が助かったとしても介護が必要な状態になり、自宅での生活が難しくなることが少なくありません。
高齢者が住み慣れた“我が家”で、安心・安全な生活を続けるためには、生活を見守り、健康を支援する仕組みが不可欠です。私たちは日常生活における生体・生活情報、外部環境情報を様々なセンサー機器等を通じてデータ化し、生活見守り・健康支援をする取り組みを「サイバーライフ」と称してプロジェクトを進めています。サイバーライフを通して、高齢者の“その人らしい暮らし“を守れる社会づくりに貢献したいと考えています。
スタッフ
- 粕川 雄司(Kasukawa Yuji, MD., PhD)
- 工藤 大輔(Kudo Daisuke, MD., PhD)
- 新井さやか(Arai Sayaka, OT)
- 市川兼之(Ichikawa Kneyuki, PT)
- 大倉和貴(Okura Kazuki, PT, PhD)
- 加賀美 開(Kagami Kai, OT, PhD)
- 菊池 耀(Kikuchi Hikaru, PT)
- 木村竜太(Kimura Ryota, MD., PhD)
- 斉藤公男(Saito Kimio, MD., PhD)
- 佐藤貴洋(Sato Takahiro, MD)
- 坂本理々子(Sakamoto Ririko, PT)
- 須田智寛(Suda Tomohiro, PT)
- 高橋裕介(Takahashi Yusuke, PT, PhD)
- 田中祐汰(Tanaka Yuta, OT)
- 千田聡明(Chida Satoaki, OT, PhD)
- 長谷川 翔(Hasegawa Kakeru, PT)
- 畠山和利(Hatakeyama Kazutoshi, PT, PhD)
- 林 正喜(Hayasi Masaki, OT)
- 皆方 伸(Minakata Shin, PT)
- 宮本大道(Miyamoto Daido, PT)
- 渡邉基起(Watanabbe Motoyuki, PT, PhD)