骨代謝
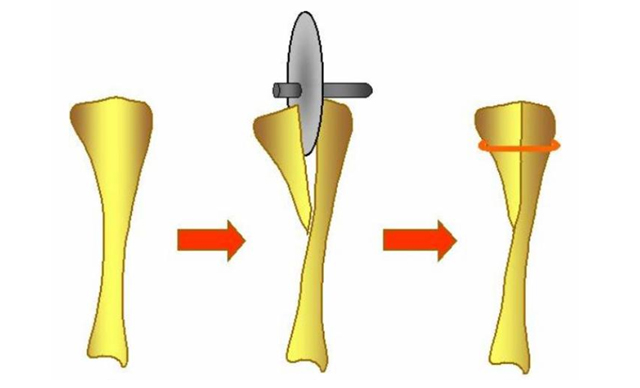
写真1 ラット脛骨に骨きりを行いワイヤーで締結し海綿骨癒合の経過を評価する。
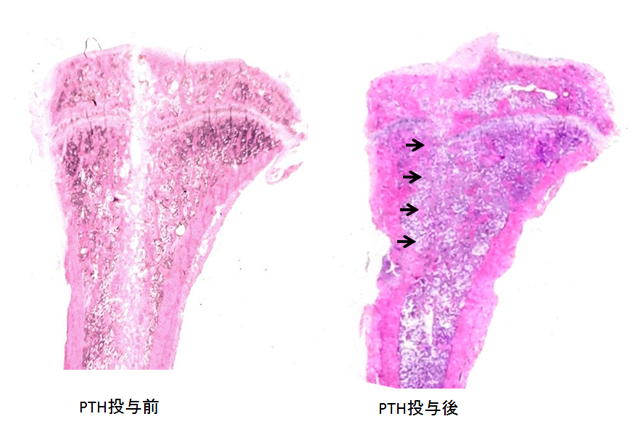
写真2 ラット脛骨骨きり後の組織標本。PTH投与により骨癒合が促進した。
骨代謝グループはこれまで、骨粗鬆症モデル動物や筋萎縮モデル動物として卵巣摘出、糖尿病負荷・糖尿病モデル、ステロイド投与、ビタミンC欠乏、関節炎モデル、尾部懸垂モデルラットを用い、様々な骨粗鬆症治療薬や運動介入の骨や骨格筋に対する効果を検討してきました。
副甲状腺ホルモン(PTH)の間歇投与が、複数の骨粗鬆症モデル動物の骨動態や骨髄組織に与える影響についての骨形態学的な研究を行い、骨粗鬆症に対するPTHの骨量増加作用を明らかにしてきました。さらに、卵巣摘出やステロイド投与による骨粗鬆症骨折モデルラット(写真1)において、PTHの間歇投与が骨癒合(写真2)や生体材料との癒合を促進すること、より早期の投与が有効なことを報告してきました。また、続発性骨粗鬆症の原因にもなる糖尿病モデルマウスや骨質が悪化するビタミンC欠乏ラットにおいても、PTHの間欠投与は骨密度や骨強度を改善しました。
また、卵巣摘出+尾部懸垂による骨粗鬆症モデルラットや糖尿病モデルラットにおいて、PTH製剤と運動療法の併用により、皮質骨の骨密度、骨構造や、骨強度が改善することを明らかにしました。さらに、卵巣摘出+尾部懸垂ラットでは、運動療法との併用により体脂肪や骨髄内脂肪量が減少しました(写真3)
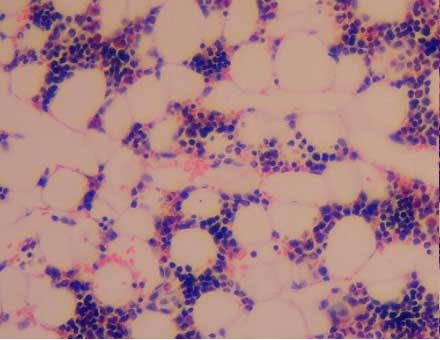
コントロール
PTH製剤
運動療法との併用
骨吸収抑制剤であるビスホスホネート製剤については、卵巣摘出ラットを用いてビスホスホネート製剤(YM-175)の長期休薬後にも骨量維持効果があることを明らかにし、ステロイド性骨減少ラットモデルにおいても骨量減少を予防することも報告しました。ビスホスホネート製剤の骨癒合に対する影響について検討したところ、高齢、卵巣摘出またはステロイド投与による骨粗鬆症骨折モデルラットにおいて、ビスホスホネート製剤(アレンドロネート)と低出力超音波パルスの併用は骨癒合を改善しました。また、関節炎モデルラットにおいては、ビスホスホネート製剤(アレンドロネート)と活性型ビタミンD製剤の併用投与は骨密度を回復しましたが、筋萎縮は改善しませんでした。さらに、第3世代のビスホスホネート製剤であるミノドロネートがホルマリンによる急性疼痛や、坐骨神経結紮による慢性疼痛に対して鎮痛効果を示すことも明らかにしました。
その他の骨粗鬆症治療薬としてビタミンK2が骨質を改善すること、活性型ビタミンDが筋力を維持し筋疲労を軽減することを明らかにしてきました。また、近年では骨粗鬆症や骨格筋の萎縮に対する薬物治療と運動療法の併用効果についても注目しており、糖尿病モデルラットにおいて活性型ビタミンDと有酸素運動が骨密度や骨格筋の萎縮に及ぼす効果について検討しています(写真4)。そのほか、Bone morphogenetic protein (BMP)やBasic fibroblast growth factor (bFGF)などの細胞増殖因子と生体材料を用いることで骨組織の再生を促進することを明らかにしました。
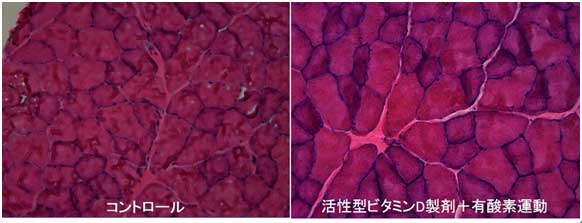
写真4 ウサギ大腿骨に骨欠損を作製。bFGFにより骨欠損部の骨再生が得られた。

写真5 スパイナルマウス。脊柱を体表からなぞり姿勢を評価する。
また、骨粗鬆症に関する臨床的な研究も積極的に行なっています。今後は超高齢化社会を向かえるにあたり、いかにして高齢者の生活の質(QOL)を向上させるかが大きな課題になってきます。そこで骨粗鬆症患者のQOLと脊柱変形や脊柱可動性に注目し、背中をマウスでなぞると脊柱の変形、前後屈をすることにより脊柱の可動性をコンピューター上で計測できるスパイナルマウス(写真5)を用い、QOLの低下には腰椎の可動性の低下が関与していることを報告しています。
一方、骨粗鬆症の高齢者は転倒によって容易に骨折を引き起こし、寝たきりなど著しいQOLの低下につながるため、高齢者の転倒にも注目し研究を行っています。スパイナルマウスを用いて脊柱可動性と背筋力、重心動揺、転倒との関係を調べています。さらに、ビタミンDの転倒に及ぼす影響についての研究や、新たな骨質マーカーと考えられているペントシジンやホモシステインの臨床研究も積極的に行っています。
スタッフ
- 宮腰尚久(Naohisa Miyakoshi)
- 粕川雄司(Yuji Kasukawa)
- 野坂光司(Koji Nozaka)
- 土江博幸(Hiroyuki Tsuchie)
- 尾野祐一(Yuichi Ono)
- 赤川学(Manabu Akagawa)

